तकनीकी डेटा लिनियर एक्ट्यूएटर ज़िप चेन एक्ट्यूएटर चयन
चयन तालिका
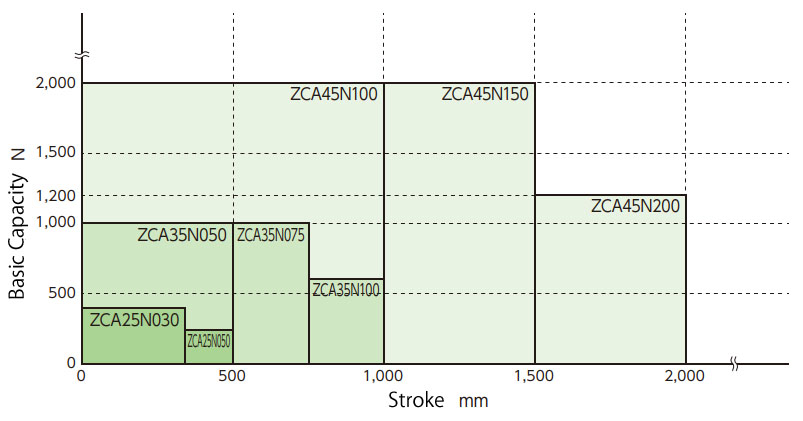
दाईं ओर का ग्राफ स्ट्रोक और मूल क्षमता के बीच संबंध दर्शाता है।
मॉडल संख्या निर्धारित करने के लिए इस ग्राफ का उपयोग करके प्रति ZCA इकाई आवश्यक थ्रस्ट और स्ट्रोक की जांच करें।
यदि विस्तृत विचार की आवश्यकता हो तो कृपया नीचे दी गई गणना की जांच करें।
चयन विधि
प्रयुक्त मशीनरी... मशीन विन्यास, प्रयुक्त ZCA इकाइयों की संख्या, परिचालन वातावरण, आदि।
लोड..... लोड विशेषताएँ, लोड या वर्कपीस द्रव्यमान, ड्राइव स्रोत, ड्राइव विधि, आदि।
माउंटिंग आकार: माउंटिंग दिशा (ऊपर की ओर, क्षैतिज, लटकती हुई), रैखिक गाइड प्रकार
परिचालन गति..... ZCA आवश्यक गति
स्ट्रोक... स्ट्रोक जो आप वास्तव में उपयोग करेंगे
1. सुधार भार Fs की गणना
लोड की प्रकृति को ध्यान में रखते हुए, सर्विस कारक (तालिका 1) का संदर्भ लेकर संशोधित लोड Fs की गणना करें।
संशोधित भार Fs N{kgf} = आवश्यक थ्रस्ट PN{kgf} × सर्विस कारक Sf
तालिका 1 सर्विस कारक
| लोड प्रकृति | उपयोग उदाहरण | सर्विस कारक Sf |
|---|---|---|
| बिना किसी झटके के सुचारू संचालन भार जड़त्व छोटा |
कन्वेयर स्विचिंग | 1.0~1.3 |
| मामूली प्रभाव के साथ संचालन भार जड़त्व माध्यम |
विभिन्न स्थानांतरण उपकरण विभिन्न भारोत्तोलक उठाने |
1.3~1.5 |
2. प्रति इकाई आवश्यक थ्रस्ट Fs1 की गणना
प्रति इकाई आवश्यक थ्रस्ट Fs1 की गणना संशोधित लोड Fs से की जाती है।
लिंक्ड ऑपरेशन के मामले में, गणना के लिए बहु कारक (तालिका 2) देखें।
प्रति ZCA इकाई प्रणोद Fs1 N{kgf} = संशोधित भार Fs N{kgf} ÷ (लिंक की गई इकाइयों की संख्या × बहु कारक Fg)
तालिका 2: बहु कारक
| लिंक की गई इकाइयों की संख्या (इकाइयाँ) | 1 इकाई | 2 इकाइयाँ | 4 इकाइयाँ |
|---|---|---|---|
| बहु कारक Fg | 1.0 | 0.83 | 0.69 |
3. नो ड्राइव यूनिट, हाइपॉइड मोटर या TERVO में से चुनें।
4. एक मॉडल नंबर चुनें
मॉडल सूची से, पुष्टि करें कि प्रति इकाई थ्रस्ट Fs1, ZCA की मूल क्षमता के बराबर या उससे कम है। स्ट्रोक के लिए कुछ मार्जिन का उपयोग करें।
[यदि कोई ड्राइव इकाई चयनित नहीं है]
मॉडल सूची से, प्रति इकाई थ्रस्ट और स्वीकार्य स्ट्रोक के आधार पर एक मॉडल संख्या का अस्थायी रूप से चयन करें। चरण 5 से आगे बढ़ें।
[यदि आप हाइपॉइड मोटर या TERVO चुनते हैं]
मॉडल सूची से, अस्थायी रूप से एक मॉडल संख्या का चयन करें जो प्रति इकाई थ्रस्ट, चेन ऑपरेटिंग गति और स्वीकार्य स्ट्रोक को संतुष्ट करता हो।
कृपया खंड 9 से आगे बढ़ें। मॉडलों की सूची के लिए, कृपया हाइपॉइड मोटर वाले मॉडलों (यहाँ) और TERVO वाले मॉडलों (यहाँ) की सूची देखें।
5. अधिकतम गति
सुनिश्चित करें कि आप अधिकतम गति से नीचे हैं।
6. आवश्यक इनपुट रोटेशन गति की जाँच करें
आवश्यक इनपुट घूर्णन गति की गणना परिचालन गति से की जाती है।
N = V×60/K N: इनपुट रोटेशन गति r/min V: ऑपरेटिंग गति mm/s K: इनपुट शाफ्ट रोटेशन प्रति ज़िप चेन गति दूरी mm (तालिका 3)
7. आवश्यक इनपुट टॉर्क की जाँच करें
आवश्यक इनपुट टॉर्क की गणना करें।
T = Fs1×Dp 2×1000×η + To
T: आवश्यक इनपुट टॉर्क N・m{kgf・m}
Fs 1: प्रति इकाई N{kgf} आवश्यक थ्रस्ट
डी पी: स्प्रोकेट पिच व्यास मिमी (तालिका 3)
η: ZCA की समग्र दक्षता (तालिका 3)
औसत नो-लोड ऑपरेटिंग टॉर्क N・m{kgf・m} तक (तालिका 3)
तालिका 3 क्षमता तालिका
| नमूना | ZCA25 | ZCA35 | ZCA45 |
|---|---|---|---|
| समग्र दक्षता η | 90% | 90% | 90% |
| *औसत नो-लोड ऑपरेटिंग टॉर्क N・m{kgf・m} तक | 0.62{0.063} | 1.63{0.17} | 5.85{0.6} |
| प्रति चक्कर इनपुट शाफ्ट यात्रा K मिमी | 95.3 | 142.9 | 240 |
| स्प्रोकेट पिच व्यास डीपी मिमी | Φ30.92 | Φ46.48 | Φ78.0 |
*यह बिना किसी भार के इनपुट शाफ्ट को लगातार घुमाने के लिए आवश्यक औसत टॉर्क है।
श्रृंखला के प्रत्येक पिच पर मेशिंग के कारण टॉर्क में उतार-चढ़ाव होता है।
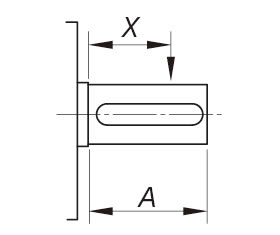
8. स्वीकार्य ओवरहैंग लोड पर विचार
जब शाफ्ट को चेन, गियर, दांतेदार बेल्ट, वी-बेल्ट आदि द्वारा संचालित किया जाता है, तो जांच लें कि ओवरहैंग लोड स्वीकार्य मान के भीतर है।
OHL: ओवरहैंगिंग लोड N{kgf}
f: संचरण तत्व गुणांक (तालिका 4)
Lf: भार अनुप्रयोग स्थिति पर निर्भर गुणांक (तालिका 5)
T: आवश्यक इनपुट टॉर्क N・m{kgf・m}
डी: स्प्रोकेट, गियर, पुली आदि का पिच सर्कल व्यास मीटर
स्वीकार्य OHL ≧ 2×T×f×Lf D
तालिका 4 ट्रांसमिशन तत्व गुणांक (f)
| जंजीर | गियर दांतेदार बेल्ट | वि बेल्ट |
|---|---|---|
| 1.0 | 1.25 | 1.5 |
तालिका 5. भार अनुप्रयोग स्थिति के आधार पर भार गुणांक (Lf)
| X/A | 0.25 | 0.5 | 0.75 | 1.0 |
|---|---|---|---|---|
| Lf | 0.9 | 1.0 | 1.15 | 1.25 |
तालिका 6 स्वीकार्य ओवरहैंग भार
| नमूना | ZCA25 | ZCA35 | ZCA45 |
|---|---|---|---|
| स्वीकार्य ओवरहैंग लोड N{kgf} | 638{65.0} | 946{96.4} | 2065{210.5} |
9. विकल्प चुनें
अपनी उपयोग शर्तों के अनुसार विकल्प का चयन करें।
- ・माउंटिंग बेस
- ·टोपी
- ・अकॉर्डियन
- ・ग्रीसिंग प्लेट
10. मॉडल नंबर पर निर्णय लेना
11. आवश्यक इनपुट क्षमता की गणना (मोटर के बिना)
आवश्यक इनपुट क्षमता P kW = T×N/9550
टिप्पणी:
यदि औसत नो-लोड ऑपरेटिंग टॉर्क आवश्यक इनपुट टॉर्क का 25% या उससे अधिक है, तो चेन की अनूठी मेशिंग क्रिया के कारण टॉर्क में उतार-चढ़ाव का महत्वपूर्ण प्रभाव पड़ेगा। सुचारू संचालन सुनिश्चित करने के लिए, ऐसा टॉर्क चुनें जो औसत नो-लोड ऑपरेटिंग टॉर्क का 1.5 गुना हो (तालिका 3)।
आवश्यक इनपुट टॉर्क का चयन करते समय सावधानियां
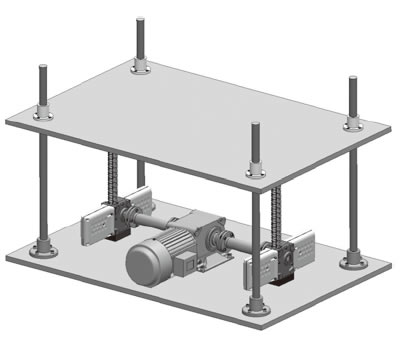
यदि ZCA को सीधी रेखा में व्यवस्थित किया गया है जैसा कि नीचे चित्र में दिखाया गया है, तो सुनिश्चित करें कि ड्राइव स्रोत से इनपुट टॉर्क स्वीकार्य इनपुट शाफ्ट टॉर्क से कम है।

दो इकाइयों के लिए आवश्यक इनपुट टॉर्क ड्राइव स्रोत पक्ष पर ZCA (1) के इनपुट शाफ्ट को प्रेषित किया जाता है।
सुनिश्चित करें कि इन दोनों इकाइयों का टॉर्क स्वीकार्य इनपुट शाफ्ट टॉर्क से कम है।
केवल ZCA (1) के लिए आवश्यक इनपुट टॉर्क T1
केवल ZCA (2) के लिए आवश्यक इनपुट टॉर्क T2
ड्राइविंग स्रोत TM का आवश्यक टॉर्क = T1 + T2 < स्वीकार्य इनपुट शाफ्ट टॉर्क
चयन उदाहरण
प्रयुक्त मशीन: दो ZCA उठाने वाले उपकरणों का उपयोग, कारखाने के अंदर (सामान्य तापमान, कोई धूल नहीं)
आवश्यक थ्रस्ट..... हल्का प्रभाव, 1200N {122kgf}/2 यूनिट, ब्रेक के साथ छोटा गियर मोटर अलग से स्थापित किया गया है और एक कपलिंग के साथ जुड़ा हुआ है
माउंटिंग प्रकार: 4 गाइड पोल (उठाने के लिए प्रयुक्त)
परिचालन गति: 250 मिमी/सेकंड (स्थिर गति: कोई त्वरण या मंदी नहीं)
स्ट्रोक.....450 मिमी
बिजली की आपूर्ति....200V/60Hz
| एस आई यूनिट |
|---|
ZCA
मोटर (60Hz)
युग्मन
|
| {गुरुत्वाकर्षण इकाई} |
|---|
ZCA
मोटर (60Hz)
युग्मन
|
यदि स्थिति नियंत्रण की आवश्यकता हो तो एनकोडर या सर्वो मोटर वाली मोटर का उपयोग करें।
(यदि आपको एनकोडर युक्त मोटर की आवश्यकता है, तो कृपया हमसे अलग से संपर्क करें।)
यह चयन उदाहरण मात्र एक उदाहरण है, इसलिए कपलिंग, माइटर गियर बॉक्स और मोटर्स का चयन करते समय कृपया समर्पित कैटलॉग देखें।
ड्राइव यूनिट
हाइपॉइड मोटर TA/TR श्रृंखला

- -यह एक कॉम्पैक्ट, छोटे आकार की गियर वाली मोटर है जो अत्यधिक कुशल हाइपॉइड गियर का उपयोग करती है और इसकी ऊंचाई कम होती है।
- - अद्वितीय ग्रीस रिसाव रोकथाम उपायों के साथ उपयोग करना आसान है, और जब एनकोडर-सुसज्जित मॉडल के साथ संयोजन में उपयोग किया जाता है, तो बहु-बिंदु स्थिति नियंत्रण भी आसान है।
माइटर गियर बॉक्स
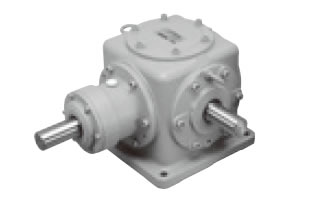
- • जब कई ज़िप चेन एक्ट्यूएटर एक साथ संचालित किया जाता है, तो माइटर गियर बॉक्स उपयोग किया जाता है।
- -हम आकार, शाफ्ट व्यवस्था, गति अनुपात, सामग्री आदि के संदर्भ में मानक मॉडल की एक विस्तृत विविधता प्रदान करते हैं।
एचटी-फ्लेक्स कपलिंग

- - स्नेहन-मुक्त, उच्च परिशुद्धता वाला युग्मन जो सर्वो मोटर चलाने के लिए भी आदर्श है।
- ・शाफ्ट बन्धन विधियों की एक विस्तृत श्रृंखला का समर्थन करता है, जिसमें कीवे, क्लैंप और टेपर लॉक, साथ ही 1 मिमी वेतन वृद्धि में सटीक शाफ्ट छेद प्रसंस्करण शामिल है।
